
Схемы роботов
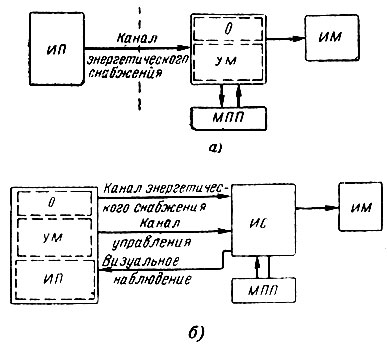
Учебно-лабораторный комплект для изучения автономных антропоморфных сервисных роботов представляет собой блочно-модульную модель робота, включающую: мобильное шасси, антропоморфный торс, две подвижных руки-манипулятора, подвижное основание головы. В состав комплекта входит: система автономной навигации робота внутри помещений, система дистанционного управления в режиме телеприсутствия, система управления манипуляционными роботами, система распознавания изображений, человеко-машинный интерфейс управления. Учебно-лабораторный комплект позволяет осуществлять программирование универсальной модели роботов для решения прикладных задач. Программирование робота и его отдельных подсистем может осуществляться с помощью скриптовых редакторов языка С и Python, блочно-графического языка Scratch и среды разработки ROS. Образовательный комплект для изучения и разработки автономных сервисных роботов. Описание Отзывы Учебно-лабораторный комплект для изучения автономных антропоморфных сервисных роботов представляет собой блочно-модульную модель робота, включающую: мобильное шасси, антропоморфный торс, две подвижных руки-манипулятора, подвижное основание головы.














Обратный звонок. Поддержать проект. Оставить заявку.





Уточнить адрес. Стать продавцом. Покупать как компания. Мобильное приложение. Подарочные сертификаты. Пункты выдачи.


Похожие статьи
- Как сшить игрушку кот своими руками - Как сшить / Игрушки своими руками, выкройки, видео, МК - ToySe
- Как связать шерстяные носки ребенку - Ламбрекен своими руками: раскрой и пошив, выкройки
- Развивающие книжки для детей выкройка - Развивающие книжки и игрушки для детей Записи в
- Как сшить длинную юбку трапецию своими руками - Юбка -трапеция : выкройка. Как сшить юбку -трапецию?