Робот объезжающий препятствия на основе микроконтроллера PIC
Arduino Robot - первая официальная версия Ардуино, в конструкции которого предусмотрены колеса. Робот состоит из двух плат, каждая из которых содержит свой микропроцессор. Плата приводов Motor Board контролирует работу двигателей, в то время, как управляющая плата Control Board считывает показания датчиков и принимает решения о дальнейших операциях. Каждая из двух плат представляет собой полноценное устройство Ардуино, программируемое с помощью среды разработки Arduino IDE. Обе платы построены на базе микроконтроллера ATmega32U4 datasheet , выводы которого связаны с различными приводами и датчиками на плате. Процесс прошивки Arduino Robot полностью аналогичен Arduino Leonardo.
")








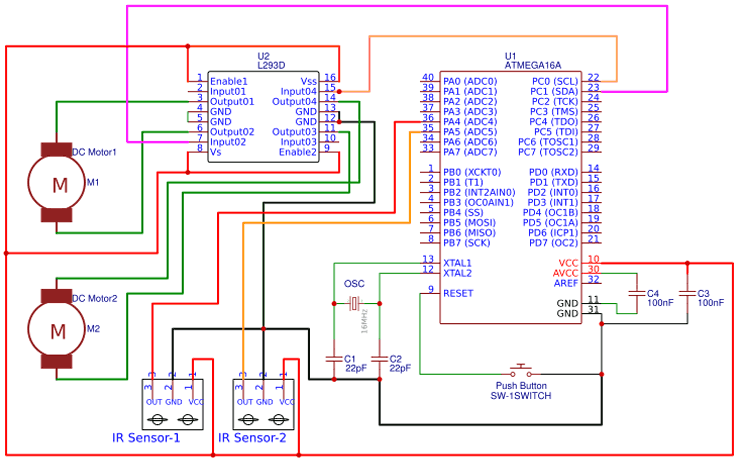
В приведенной схеме рекомендуется использовать электродвигатели с током потребления до мА и напряжением питания В. При использовании более мощных моторов рекомендуется применить раздельное питание электронной схемы и электродвигателей, а также предусмотреть меры по стабилизации работы микроконтроллера. Так ли они необходимы? Это очень хороший вопрос, старина Бибот. Внешний pull-up резистор, о котором ты говоришь, подключают к выводу RESET для предотвращения случайного сброса микроконтроллера при просадках питания, а конденсатор - для дополнительной защиты линии RESET от внешних помех.









В данной статье представлен проект самодельного простого робота пылесоса на микроконтроллере Atmega8. Конечно идеально чистой он вашу квартиру не сделает но пыли и мелкого мусора чуток соберет. Ориентация в пространстве, если конечно это можно так назвать, осуществляется при помощи кнопок расположенных в передней части робота - это своего рода зрение робота. Как только на пути робота появляется препятствии кнопка замыкается и сигнал поступает в микроконтроллере который в свою очередь меняет направление движения робота.